




Manipuliatorius su spaustuku
Įvadas
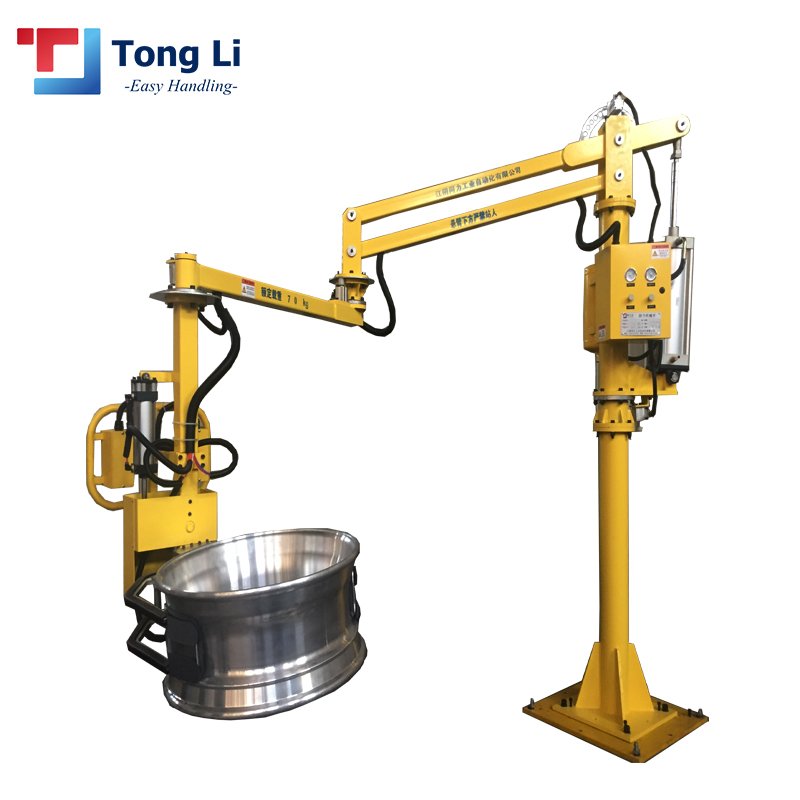
a) Tas pats jėgos kietos rankos pagalbinis manipuliatorius gali subalansuoti įvairius svorius nuo 2 iki 500 kg.
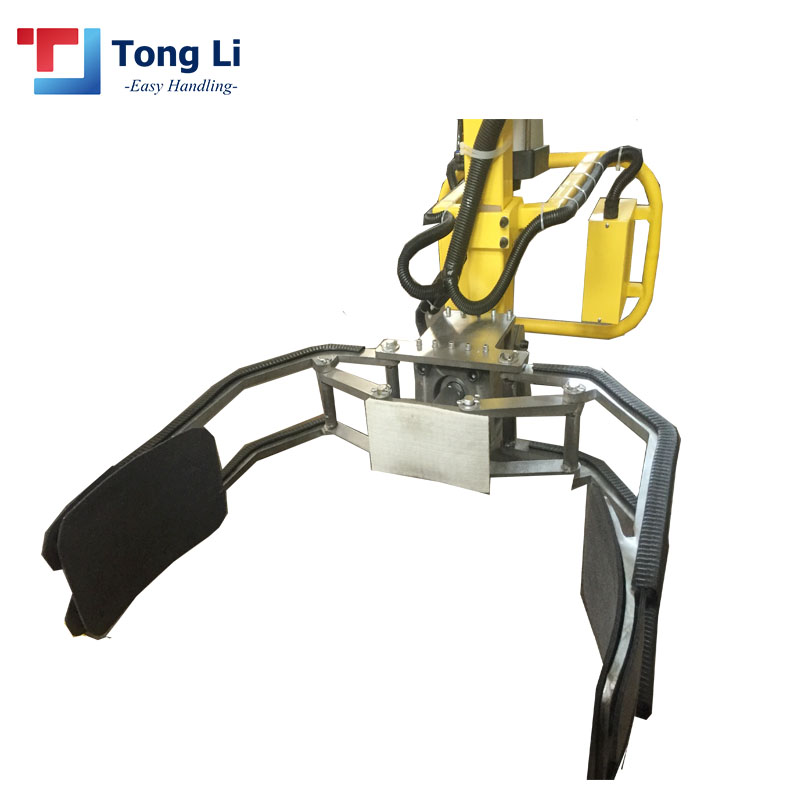
b) Mechaniškai valdomas manipuliatorius sudarytas iš balansavimo mechanizmo, suėmimo įtaiso ir montavimo konstrukcijos.
c) Manipuliatoriaus mazgas yra pagrindinis įrenginys, realizuojantis medžiagų (arba ruošinių) negravitacinę plūduriavimo būseną ore.
d) Manipuliatorius yra įtaisas, kuris suima ruošinį ir atlieka atitinkamus naudotojo keliamus tvarkymo ir surinkimo reikalavimus.
e) Įrengimo konstrukcija yra mechanizmas, kuris palaiko visą įrangos komplektą pagal naudotojo aptarnavimo zoną ir vietos sąlygas.

| Įrangos modelis | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Talpa | 50 kg | 100 kg | 200 kg | 300 kg |
| Darbinis spindulys | 2500 mm | 2500 mm | 2500 mm | 2500 mm |
| Kėlimo aukštis | 1500 mm | 1500 mm | 1500 mm | 1500 mm |
| Oro slėgis | 0,5–0,8 MPa | 0,5–0,8 MPa | 0,5–0,8 MPa | 0,5–0,8 MPa |
| Sukimosi kampas A | 360° | 360° | 360° | 360° |
| Sukimosi kampas B | 300° | 300° | 300° | 300° |
| Sukimosi kampas C | 360° | 360° | 360° | 360° |






a) Jis gali realizuoti skirtingo svorio medžiagų gravitacinę pusiausvyros būseną, kuri tinka tiksliam medžiagų perkėlimo darbui.
b) Kai apdorojama be apkrovos, pilna apkrova ir skirtingi ruošiniai, sistema gali pajusti svorio pokytį ir realizuoti krovinio plaukiojančią būseną trimatėje erdvėje, kuri yra patogi tiksliam padėties nustatymui.
c) Visiškas balansas, sklandus judėjimas ir kt. leidžia operatoriui lengvai tvarkyti, pozicionuoti ir surinkti ruošinį.
d) Tvirta rankena gali priversti manipuliatorių pernešti ruošinį per kliūtis; horizontali rankena gali atitikti horizontalaus medžiagų išdėstymo ir horizontalaus šalinimo reikalavimus atitinkamose vietose.
e) Sistema visada gali išlaikyti manipuliatoriaus galvos lygį ir užtikrinti didelį darbingumą.
f) Jungtinis stabdžių įtaisas su keliomis sukamosiomis jungtimis, skirtas medžiagų surinkimui ir išdėstymui plačiame plote; su stabdžių įtaisu operatorius gali bet kuriuo metu sustabdyti manipuliatoriaus judėjimą operacijos metu.



Šio tipo galios manipuliatorius gali pakelti iki 500 kg ruošinio. Darbinis spindulys yra apie 2500 mm, o kėlimo aukštis – apie 1500 mm. Atsižvelgiant į keliamo ruošinio svorį, reikėtų rinktis mažiausio tipo įrenginį, atsižvelgiant į maksimalų ruošinio svorį. Jei manipuliatorius gali pakelti iki 200 kg maksimalią apkrovą ir 30 kg ruošinio, veikimo našumas tikrai nėra geras ir jaučiasi labai sunkus. Įranga standartiškai aprūpinta oro kaupimo baku, kuris gali atlikti veikimo ciklą nutrūkus dujų tiekimui. Tuo pačiu metu jis įjungia signalizaciją, primindamas operatoriui. Kai oro slėgis nukrenta iki tam tikro lygio, jis įjungia savaiminio fiksavimo funkciją, kad ruošinys nenukristų. Manipuliatorius turi saugos sistemą, todėl tvarkymo metu arba ruošinys nėra saugioje vietoje, operatorius negali jo atlaisvinti. Su įvairiais nestandartiniais tvirtinimo elementais, kietos rankos galios manipuliatorius gali lengvai atlikti įvairius proceso veiksmus.





