
Pakrovimo ir iškrovimo robotas yra įrenginys, naudojamas visiškai automatizuoti staklių gamybos procesą.
Pakrovimo ir iškrovimo robotas daugiausia automatizuoja staklių gamybos procesą ir naudoja integruotą apdorojimo technologiją. Jis tinka pakrovimui ir iškrovimui, ruošinių tekinimo ir sukimo darbams gamybos linijose. Daugelis apdirbimo operacijų priklauso nuo specialių staklių arba rankinio darbo. Tai idealiai tinka ribotam gaminių skaičiui ir mažiems gamybos pajėgumams. Tačiau tobulėjant technologijoms ir sparčiai atnaujinant gaminius, specializuotų staklių arba rankinio darbo naudojimas atskleidė daugybę trūkumų ir silpnųjų vietų. Pirma, specializuotoms staklėms reikia didelio grindų ploto, jos yra sudėtingos ir nereikalauja nepatogios priežiūros, todėl jos netinka automatizuotai surinkimo linijų gamybai. Antra, joms trūksta lankstumo, todėl sunku prisitaikyti prie greitai kintančių sąlygų ir trukdo koreguoti gaminių asortimentą. Be to, rankinis darbas padidina darbo intensyvumą, yra linkęs į su darbu susijusius nelaimingus atsitikimus ir lemia santykinai mažą efektyvumą. Be to, naudojant rankinius pakrovimo ir iškrovimo metodus pagamintų gaminių kokybė nėra pakankamai stabili, kad atitiktų didelio masto gamybos reikalavimus.
Šias problemas galima išspręsti naudojant pakrovimo ir iškrovimo robotų valdomą automatizuotą lanksčią tvarkymo sistemą. Ši sistema pasižymi dideliu efektyvumu ir stabilia gaminių kokybe, dideliu lankstumu ir patikimumu bei paprasta ir lengvai prižiūrima konstrukcija. Ji gali patenkinti įvairių gaminių gamybos poreikius, leisdama vartotojams greitai koreguoti gaminių asortimentą ir išplėsti gamybos pajėgumus, tuo pačiu žymiai sumažinant pramonės darbuotojų darbo krūvį.
Mechaninės savybės
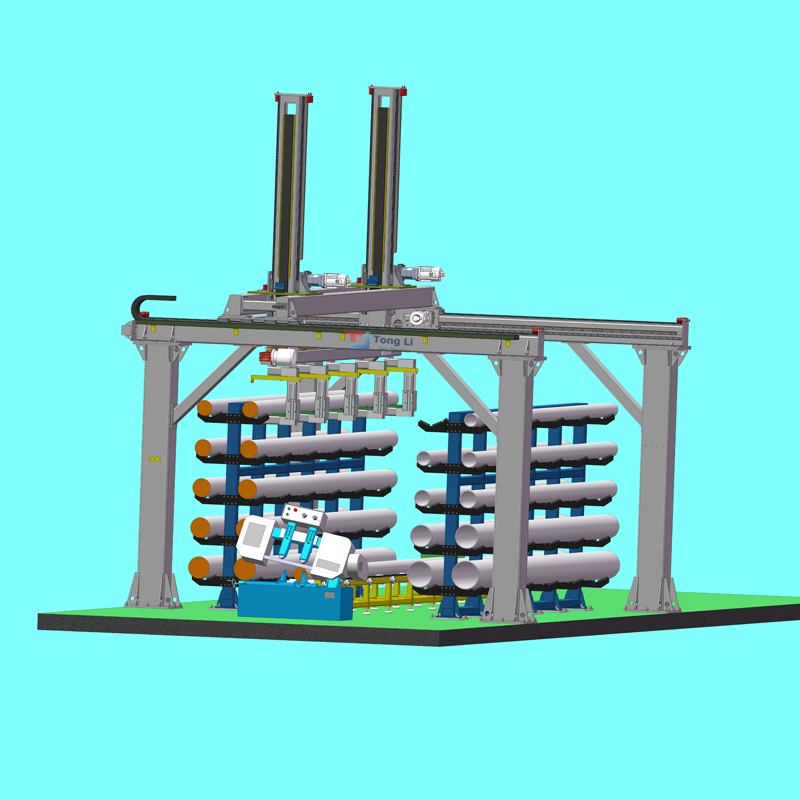
Pakrovimo ir iškrovimo robotas yra modulinės konstrukcijos ir gali būti derinamas įvairiomis konfigūracijomis, kad būtų suformuota daugiablokė gamybos linija. Jo komponentai apima: kolonas, skersines sijas (X ašis), vertikalias sijas (Z ašis), valdymo sistemas, pakrovimo ir iškrovimo bunkerių sistemas ir griebtuvų sistemas. Kiekvienas modulis yra mechaniškai nepriklausomas ir gali būti derinamas bet kokiu būdu tam tikrame diapazone, o tai leidžia automatizuoti tokios įrangos kaip tekinimo staklės, apdirbimo centrai, krumpliaračių formavimo staklės, EDM staklės ir šlifuokliai gamybą.
Pakrovimo ir iškrovimo robotą galima montuoti ir derinti atskirai nuo apdirbimo centro, o staklių dalis gali būti standartinė mašina. Roboto dalis yra visiškai nepriklausomas vienetas, leidžiantis automatizuoti ir atnaujinti esamas stakles net kliento vietoje. Kitaip tariant, robotui sugedus, jį tereikia sureguliuoti arba suremontuoti, nepaveikiant įprasto staklių veikimo.
Valdymo sistema
Roboto valdymo sistema yra visos automatizavimo linijos smegenys, valdančios kiekvieną mechanizmo dalį, kuri gali veikti savarankiškai arba koordinuotai, kad gamyba vyktų sklandžiai.
Roboto valdymo sistemos funkcijos:
①Roboto trajektorijos programavimas;
②Kiekvienos mechanizmo dalies nepriklausomas veikimas;
③Teikti reikalingas eksploatavimo gaires ir diagnostinę informaciją;
④Roboto ir staklės darbo proceso koordinavimas;
5. Valdymo sistema turi daug įvesties / išvesties prievadų išteklių ir yra plečiama;
6. Įvairūs valdymo režimai, tokie kaip: automatinis, rankinis, stabdymo, avarinio stabdymo, gedimų diagnostikos.
Privalumai
(1) Didelis gamybos efektyvumas: siekiant pagerinti gamybos efektyvumą, reikia kontroliuoti gamybos ritmą. Be fiksuoto gamybos ir perdirbimo ritmo, kurio negalima pagerinti, automatinis pakrovimas ir iškrovimas pakeičia rankinį valdymą, kuris gali gerai kontroliuoti ritmą ir išvengti žmogiškųjų veiksnių įtakos gamybos ritmui, o tai labai pagerina gamybos efektyvumą.
(2) Lankstus proceso modifikavimas: gamybos procesą galime greitai pakeisti modifikuodami programą ir griebtuvų tvirtinimo elementus. Derinimo greitis yra didelis, todėl nereikia darbuotojų mokymo laiko ir procesas gali būti greitai pradėtas gaminti.
(3) Pagerinti ruošinių kokybę: robotų valdoma automatizuota gamybos linija visiškai užbaigiama robotų, pradedant pakrovimu, prispaudimu ir iškrovimu, taip sumažinant tarpinių grandžių skaičių. Detalių kokybė gerokai pagerėja, ypač ruošinio paviršius tampa gražesnis.
Praktiškai automatiniai pakrovimo ir iškrovimo robotai gali būti plačiai naudojami beveik visose pramoninės gamybos srityse. Jie pasižymi lengvu valdymu, dideliu efektyvumu ir aukšta ruošinių kokybe. Tuo pačiu metu jie gali apsaugoti operatorius nuo sunkios ir monotoniškos darbo aplinkos. Gamintojai juos vis labiau renkasi. Tokios gamybos linijos turėjimas neabejotinai pabrėš įmonės gamybos pajėgumus ir pagerins rinkos konkurencingumą. Tai neišvengiama pramoninės gamybos ir perdirbimo tendencija.
Įrašo laikas: 2025 m. spalio 20 d.